As I mentioned in the gift thread a few weeks ago. I was fortunate enough to receive an OpenROV 2.8 kit for Christmas and wanted to document the process on the boards.
It is a fully contained submersible drone that can be controlled by a Xbox controller, can descend up to 300 feet, and streams live video back to your laptop. I've never been interested in an aerial drone, but when I saw this a few years ago, I put it on my wish-list. The OpenROV guys have a pre-built model coming out in late 2017, the Trident, but I wanted to build my own.
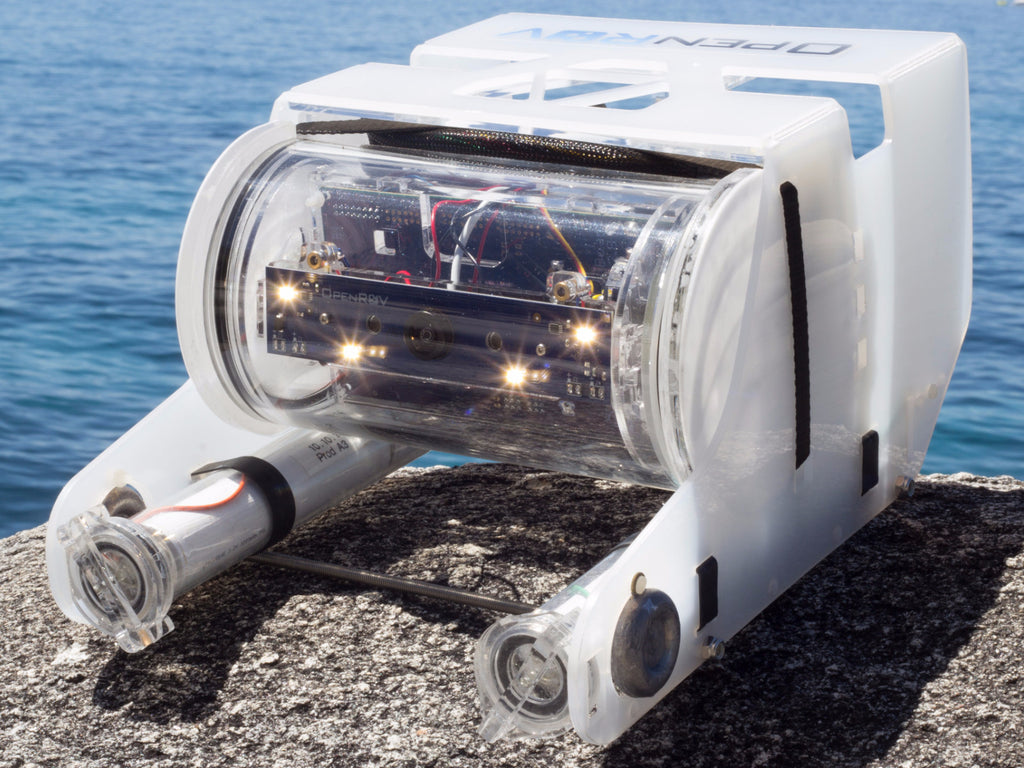
For those of you who don't care about the build process. This is what it looks like. I promise I'll have something similar to show you as well.
https://www.openrov.com/
It is a fully contained submersible drone that can be controlled by a Xbox controller, can descend up to 300 feet, and streams live video back to your laptop. I've never been interested in an aerial drone, but when I saw this a few years ago, I put it on my wish-list. The OpenROV guys have a pre-built model coming out in late 2017, the Trident, but I wanted to build my own.
For those of you who don't care about the build process. This is what it looks like. I promise I'll have something similar to show you as well.
https://www.openrov.com/

Laser-cut acrylic pieces ready for assembly.

Arranging the acrylic pieces for the main body structure.

First time ever using acrylic cement. I was certain that one of the local hobby shops would have this so I called around to a few. I may as well have been asking if they had meth in stock for the way these people responded. I ended up ordering it on Amazon. It has special shipping restrictions so it took a few weeks to get here.
I used Weld-On 4 which is a water thin version. https://www.amazon.com/Weld-Acrylic-Adhesive-Applicator-Bottle/dp/B0096TWKCW
Acrylic cement is a solvent that basically welds two pieces of acrylic together by softening the material and then fusing them as it evaporates. It is fantastic from a strength standpoint and once you get the hang of it, fairly easy to apply. Unlike super glue, if you spill a little extra on the face of one of your pieces, you aren't going to get an ugly pile of dried glue, the cement will evaporate away. The capillary effect is a big help as it effectively pulls the cement into the butted joint.

Acrylic cement loaded into the syringe/bottle applicator.

Cementing the vertical motor mount.

Another view of the vertical thruster mount.

Cementing the port and starboard thruster support trusses.

Closer view of the cement application on the support trusses.

I need more bench vises. This was my creative solution at supporting the camera mount while I cemented the camera supports.

Cementing the skeleton of the ROV together.

Finished camera mount and ROV skeleton.

Time to build the electronics assembly.


Cementing the electronic mount end-cap

Pieces for the battery tube end-caps and a thruster/mount

As you'll notice throughout the build. It calls for creative uses of unrelated parts. In this instance, you use the thruster shaft to align the battery tube end-caps properly. These are supremely important as they are all that stands between your Lithium-Ion batteries and the crushing depths.

Completed battery end-caps and the acrylic components built thus far.



















































































